气泡广泛存在于自然环境、生物体以及工业生产中,气泡多功能操控在微流控、沸腾传热和界面减阻等领域有着广阔的应用前景。近年来,光响应气泡操控技术因其非接触和高时空精度的优点引起了广泛的关注。然而,现有光响应表面存在驱动力小和气泡操控能力弱等问题。

近日,我院刘亚华教授课题组设计制备了一种光热释电超滑表面,利用近红外光实现了水下气泡快速输运、分割、合并和脱离等多功能高效操控,并揭示了其机理。该研究成果以“Versatile bubble maneuvering on photopyroelectric slippery surfaces”为题发表在国际期刊Nature Communications上。
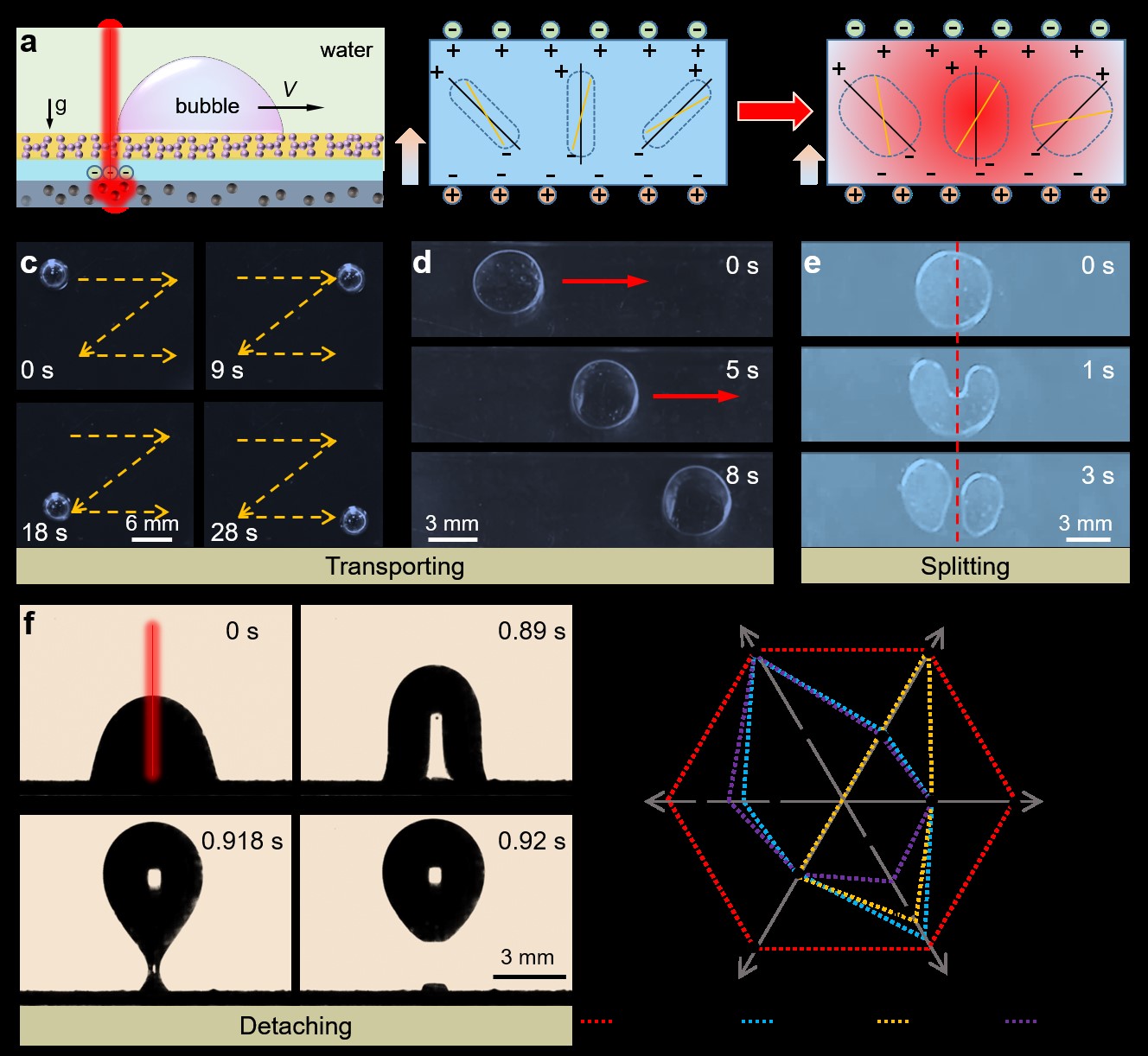
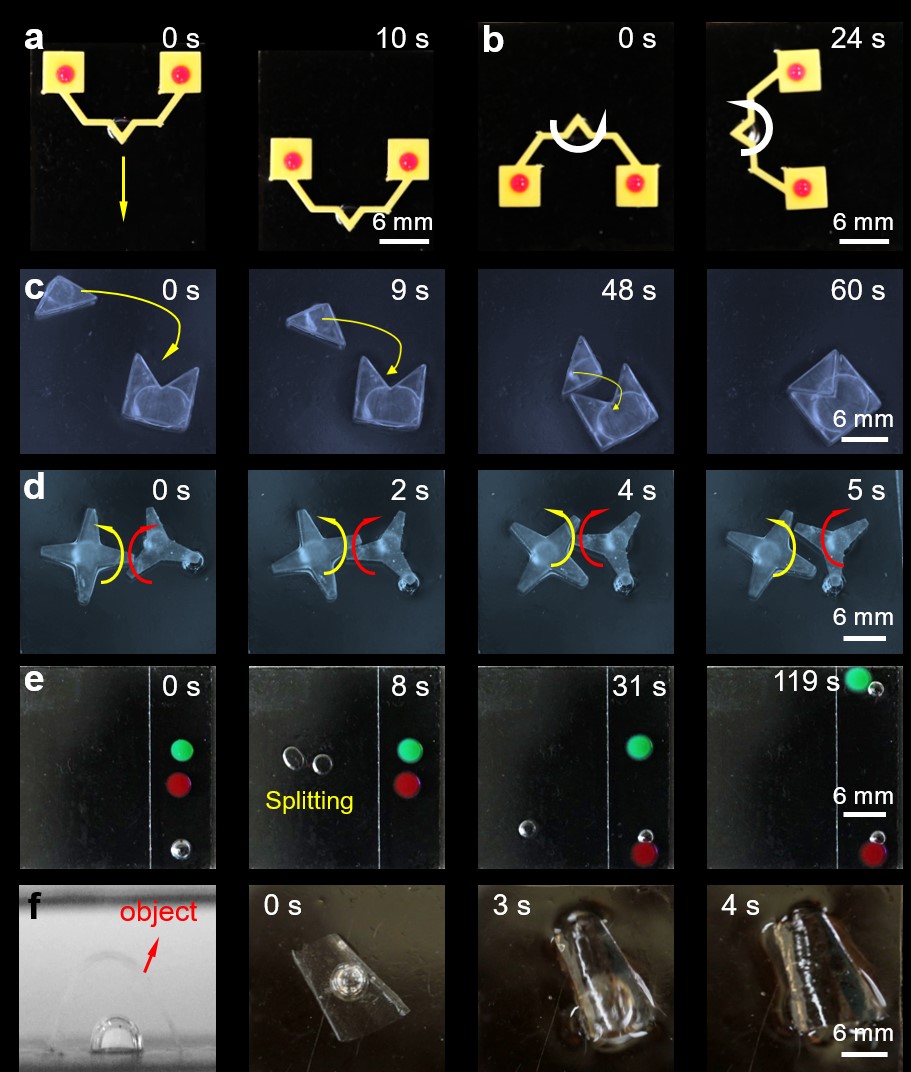
光热释电超滑表面由从上到下的超滑层、热释电层和光热层组成,其高效气泡操控源于近红外光作用下表面产生的强大驱动力。首先,当近红外光照射气泡边缘后产生介电润湿现象,气泡被光照射的一侧接触角变大,引起非对称变形,进而产生拉普拉斯力驱动气泡远离光源。同时,近红外光照射表面引起的非均匀温度场诱发非均匀电场,进一步产生介电泳力驱动气泡远离光源。上述两个驱动力的协同作用实现了气泡的高效操控。基于此,研究团队进一步开发了气泡机器人,实现了货物运输、零件组装、齿轮传动、协同分拣和水下打捞等工作。该研究为气泡操控在微流控系统、沸腾传热以及微机器人等多领域的应用开辟了新途径。
文章第一作者为大连理工大学机械工程学院博士生詹海洋,通讯作者为大连理工大学刘亚华教授。其他作者包括大连理工大学机械工程学院原子超、李宇、张亮、冯诗乐教授和赵磊副教授以及中国科学院沈阳自动化研究所梁辉、赵宇辉和王志国。该研究成果得到了国家重点研发计划项目和国家自然科学基金项目等的资助。
论文链接:https://www.nature.com/articles/s41467-023-41918-y

